÷ς“≥Θ®http://www.pttcn.netΘ©ΘΚœκ―–ΨΩΈό»ΥΜζ÷«ΡήΦ·»Κ±ύΕ”Θ§’β–©ΚΥ–ΡΦΦ θ±Ί–κ’ΤΈ’ ΥΉΜΑΥΒΘΚΥΪ»≠Ρ―Β–ΥΡ ÷Θ§ΚΟΚΚΦή≤ΜΉΓ»Κά«ΓΘ’βΨδΜΑ≤ΜΫωΖ≈‘Ύ»Υάύ άΫγΓΔΕ·Έο άΫγ ”ΟΘ§ΩΤΦΦΖΔ’ΙΒΡΫώΧλΑ―’βΨδΥΉ”οΖ≈‘Ύ÷«ΡήΜζΤςΝλ”ρ“≤Ά§―υ ”ΟΓΘΩ¥ΙΐΓΕ–«Φ Ο‘ΚΫΓΖΓΕΕάΝΔ»’ΓΖΒΡΝΫ≤ΩΩΤΜΟΒγ”ΑΒΡ≈σ”―”ΠΗΟΕΦΦ«ΒΟΘ§άοΟφ≥ωœ÷ΒΡΈό»ΥΜζΦ·»ΚΉς’ΫΒΡΨΒΆΖΘ§Ρ« ±œύ–≈≤Μ…Ό»ΥΩ¥ΒΫ’β―υΒΡΨΒΆΖΕΦΜαΨΣΧΨ≤Μ“―Θ§≤ΔΖΔ≥ω’β―υΒΡΗ–ΧΨΘΩΓΑ‘≠ά¥Έό»ΥΜζ“≤Ω…“‘“Μ»ΚΟέΖδ“Μ―υΘ§‘Ύβß≤ΜΦΑΖά ±Ε‘ΡψΖΔΤπΙΞΜςΓ±ΓΘΥϋ≤Μ‘Ό «Έ“Ο«»’≥Θ…ζΜν÷–ΒΞ¥ΩΩ¥ΒΫΒΡ÷ΜΩ…“‘≈Ρ≈Ρ’’Τ§ΚΆ ”ΤΒΓΘΥϋ±δΒΟΗϋ”–÷«ΜέΘ§”–ΗϋΗΏΒΡ”Π”ΟΦέ÷ΒΓΘ
Έό»ΥΜζΦ·»ΚΉς’ΫΘ§¥”Βγ”ΑΉΏΫχ…ζΜνΘ§≥ΐΝΥΡ«–©λ≈ΩαΒΡΒγ”ΑΨΒΆΖΘ§ΥϋΜΙ”–ΗϋΕύ≤ΜΩ…–ΓξοΒΡ”≈ Τ–η“ΣΈ“Ο«»ΞΝΥΫβΓΘ Έό»ΥΜζΦ·»Κ”≈ Τ ΒΆ…ζ≤ζ≥…±ΨΘ§ΗΏ Ι”Ο–ß¬ Έό»ΥΜζΦ·»ΚœΒΆ≥“ΜΑψ”…≤ΜΆ§ΒΡΤΫΧ® Βœ÷ΗΏΒΆΜλ¥νΓΘΦ·»Κ÷– Ι”Ο¥σΝΩΖ÷…ΔΒΡΒΆ≥…±ΨœΒΆ≥–Έ≥…ΙΠΡήΜΞ≤ΙΓΘ’κΕ‘≤ΜΆ§ΒΡ»ΈΈώΡΩ±ξΘ§Ω…Ά®ΙΐΒς’ϊ¥ν≈δΒΡΗς–ΆΈό»ΥΜζΒΡ ΐΝΩΩλΥΌ ”ΠΘ§Οβ»ΞΝΥΩΣΖΔΉ®”ΟΗ¥‘”œΒΆ≥…η±ΗΒΡ≥…±ΨΓΘ‘ΎΨϋ ¬Νλ”ρ÷–Θ§œύ±»”Ύ¥ΪΆ≥ΈδΤςœΒΆ≥Θ§Έό»ΥΜζΦ·»ΚΒΡ ΌΟϋ÷ήΤΎΖ―”ΟΒΆΓΘάΐ»γ“ΜΟΕΓΑ”ψ≤φΓ±ΒΦΒ·120ΆρΟά‘ΣΒΡ≥…±ΨΩ…“‘ΙΚ¬ρ80ΦήΓΑΫΦά«Γ±Έό»ΥΜζΘ§«“≤Μ–η“Σ≥Λ ±ΦδΖΰ“έΒΡΈ§–ό±Θ―χΖ―”ΟΓΘΈό»ΥΜζΦ·»Κ“ΜΖΫΟφΝς≥ΧΜ·…ζ≤ζ≥…±ΨΒΆΘ§ΉιΉΑΥΌΕ»ΩλΘ§Νμ“ΜΖΫΟφΩ…“‘ΩλΥΌœϊΚΡΒ–ΖΫΖάΩ’ΒΦΒ·Θ§ΗΏ–ߥίΜΌΒ–ΖΫάΉ¥οΒ»ΗΏΦέ÷ΒΉΑ±ΗΘ§ΨΏ”–Ζ«Ε‘≥ΤΒΡ≥…±Ψ”≈ ΤΓΘ Ζ÷≤Φ ΫΦ·»Κ÷«Μέ Φ·»Κ÷–¥σΝΩΒΡ÷’ΕΥΤΫΧ®Ω… Βœ÷Ζ÷≤Φ ΫΆΕΤ±“‘ΫβΨωΈ ΧβΘ§Φ·»ΚΉς“Β÷–ΟΩ“ΜΗω÷’ΕΥΒΟΒΫΒΡ–≈œΔΗς≤ΜœύΆ§Θ§Ήω≥ωΒΡΨω≤ΏΩ…ΡήΈεΜ®ΑΥΟ≈ΓΘ‘Ύ’β÷÷«ιΩωœ¬Θ§ΫΪΦ·»Κ÷–ΒΡΨω≤ΏΫχ––ΜψΉήΚΆΆΕΤ±Θ§Ω…“‘œ‘÷χΧαΗΏΫαΙϊΒΡ’ΐ»Ζ–‘Θ§±ήΟβΥφΜζΈσ≤νΓΘ Ζ÷≤Φ ΫΧΫ≤β Έό»ΥΜζΦ·»ΚΨΏ”–Ζ÷…ΔΕ»ΗΏΘ§Ψ÷≤ΩΗ–÷ΣΡήΝΠ«ΩΕχ»ΪΨ÷Η–÷ΣΡήΝΠ»θΒΡΧΊΒψΓΘΒΪ «»γΙϊΡήΑ―Φ·»Κ÷–ΒΡΟΩ“ΜΗω÷’ΕΥΒΡΧΫ≤β–≈œΔΜψΉή»ΎΚœΘ§Ω…“‘ Βœ÷»ΪΨ÷–≈œΔΒΡΗΏ–ßΜώ»ΓΓΘ ΗϋΗΏΒΡΩ…ΩΩ–‘ Έό»ΥΜζΦ·»ΚΒΡΖ÷≤Φ ΫΧΊ–‘ΨωΕ®ΝΥΒ±Φ·»Κ÷–ΒΡ≤ΩΖ÷…η±ΗΙ ’œΚσΘ§ΤδΥϊΈό»ΥΜζΩ…“‘―ΗΥΌ÷Ί–¬ΙφΜ°»ΈΈώΘ§Χν≤ΙΩ’»±Θ§¥”ΕχΆξ≥…‘ΛΕ®ΒΡ»Ϊ≤ΩΡΩ±ξΜρ¥σ≤ΩΖ÷ΡΩ±ξΓΘ±ήΟβ¥ΪΆ≥¥σ–ΆΗ¥‘”Ή®”ΟœΒΆ≥ΒΡΒΆ»Ώ”ύ»±œίΓΘΡήΙΜΦΪ¥σΒΊΧαΗΏ––Ε·ΒΡ≥…ΙΠ¬ ΓΘ Ψ≠Ιΐ…œ ωΖ÷ΈωΘ§ΚήΕύΈό»ΥΜζΑ°ΚΟ’ΏΘ§–Ράο «≤Μ «‘ΎΡ≈ΚΑΉ≈Θ§ΓΑΈό»ΥΜζ÷«ΡήΦ·»ΚΧΪάςΚΠΝΥΘ§Έ““ΣΚΟΚΟ―–ΨΩ―–ΨΩΥϋΓ±ΓΘΒΪ «±πΉ≈Φ±≈ΕΘΓœκ“ΣΕ‘Έό»ΥΜζΦ·»ΚΖΫΟφ”–…νΕ»―–ΨΩΜΙ“Σ’ΤΈ’“‘œ¬ΙΊΦϋΦΦ θ≤≈––ΡΊΘΓ
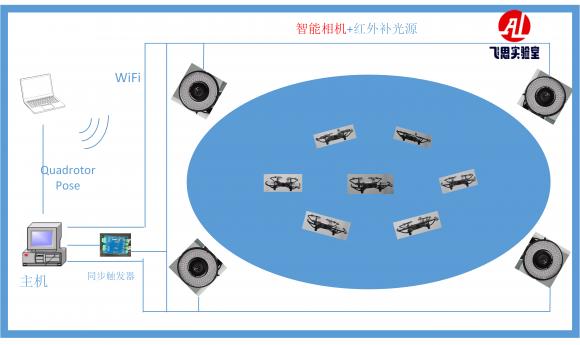
Έό»ΥΜζΦ·»ΚΦΦ θΚΥ–Ρ Φ·»ΚΩΊ÷ΤΥψΖ® ΕύΈό»ΥΖ…––ΤςœΒΆ≥“Σ Βœ÷œύΜΞΦδΒΡ–≠Ά§ΨΆ±Ί–κ»ΖΕ®Έό»ΥΖ…––Τς÷°Φδ¬ΏΦ≠…œΚΆΈοάμ…œΒΡ–≈œΔΙΊœΒΚΆΩΊ÷ΤΙΊœΒΘ§’κΕ‘’β–©Έ ΧβΕχΫχ––ΒΡΧεœΒΫαΙΙ―–ΨΩΩ…“‘ΫΪΕύΈό»ΥΖ…––ΤςœΒΆ≥ΒΡΫαΙΙΚΆΩΊ÷Τ”–Ζ…––ΤςΒΊΫαΚœΤπά¥Θ§±Θ÷ΛΕύΈό»ΥΖ…––ΤςœΒΆ≥÷––≈œΔΝςΚΆΩΊ÷ΤΝςΒΡ≥©Ά®Θ§ΈΣΈό»ΥΖ…––Τς÷°ΦδΒΡΫΜΜΞΧαΙ©ΩρΦήΓΘΦ·»ΚΩΊ÷ΤΥψΖ®≤ΜΫω“Σ±Θ÷ΛΕύΈό»ΥΖ…––Τς÷°ΦδΡή”––ßΒΊΫχ–––≠Ά§Θ§Εχ«“≤Μ“άάΒ”ΎΈό»ΥΖ…––ΤςΒΡ ΐΝΩΘ§Φ¥Έό»ΥΖ…––ΤςΩ…“‘Υφ ±ΆΥ≥ωΜρ’ΏΦ”»κΦ·»ΚΘ§Εχ≤ΜΜα”ΑœλΩΊ÷ΤœΒΆ≥ΒΡ’ϊΧεΫαΙΙΓΘ Ά®–≈Άχ¬γ…ηΦΤ ‘ΎΕύΈό»ΥΖ…––Τς–≠Ά§»ΈΈώΉ‘Ήι÷·œΒΆ≥÷–Θ§Έό»ΥΖ…––ΤςΉςΈΣΆ®–≈Άχ¬γΫΎΒψΘ§ΤδΩ’ΦδΒΡΖ÷≤ΦΨωΕ®ΝΥΆχ¬γΒΡΆΊΤΥΫαΙΙΘ§Εχ≤ΜΆ§ΒΡΆχ¬γΆΊΤΥΫαΙΙ”–Ή≈≤ΜΆ§ΒΡΆ®–≈–‘ΡήΓΘ‘Ύ“ΜΕ®ΒΡΆ®–≈ΆΊΤΥΦΑ–‘Ρήœ¬Θ§ΗυΨίΥυ÷¥––ΒΡ»ΈΈώΖ÷≈δΆ®–≈Ή ‘¥Θ§ΧαΗΏΆ®–≈÷ ΝΩΘ§ «Φ·»ΚΦΦ θΒΡΡ―Χβ÷°“ΜΓΘ ΩΊ÷ΤΥψΖ®”κΆ®―ΕΦΦ θΒΡώνΚœ ΕύΈό»ΥΖ…––ΤςΈΣΝΥΧαΗΏ–≠Ά§Άξ≥…»ΈΈώΒΡ–ßΡήΘ§–η“ΣΫχ–––≈œΔΫΜΜΞΓΘΈΣΝΥ ΙΒΟΥυΫΜΜΞΒΡ–≈œΔΦΑ ±Άξ’ϊΒΊΫχ––¥Ϊ δΘ§Ε‘”ΎΆ®–≈Άχ¬γ–‘Ρή”–“ΜΕ®ΒΡ“Σ«σΓΘΜυ”ΎΆ®–≈÷ ΝΩ‘Φ χΒΡ–≠Ά§ΩΊ÷ΤΖΫΖ®Θ§ΨΆ «‘ΎΒ±«ΑΒΡΆ®–≈ΖΰΈώ÷ ΝΩ‘Φ χœ¬Θ§…ηΦΤΕύΈό»ΥΖ…––Τς–≠Ά§ΩΊ÷ΤΖΫΖ®Θ§ ΙΒΟ‘Ύ’β÷÷ΩΊ÷ΤΖΫΖ®œ¬Θ§ΕύΈό»ΥΖ…––ΤςΒΡ‘ΥΕ·Φ»¬ζΉψ»ΈΈώ–η«σΘ§”÷Ω…“‘ ΙΒΟΕύΈό»ΥΖ…––ΤςΙΙ‘λΒΡΆ®–≈Άχ¬γ–‘ΡήΘ§¬ζΉψ–≈œΔΦΑ ±Άξ’ϊ¥Ϊ δΒΡ–η«σΘ§ΫχΕχΧαΗΏΕύΈό»ΥΖ…––Τς–≠Ά§Άξ≥…»ΈΈώΒΡ–ßΡήΓΘ »ΈΈώΙφΜ°ΦΦ θ ΈΣΝΥ Βœ÷ΕύΈό»ΥΖ…––Τς÷°Φδ”––ßΒΡ»ΈΈώ–≠Ά§Θ§Ά§ ±±Θ÷ΛΩΊ÷ΤΫαΙΙ≤Μ“άάΒ”ΎΈό»ΥΖ…––ΤςΒΡ ΐΝΩΘ§ΙΙΫ®ΕύΈό»ΥΖ…––Τς–≠Ά§»ΈΈώΉ‘Ήι÷·œΒΆ≥Ζ÷≤Φ ΫΧεœΒΫαΙΙΘ§ΗςΈό»ΥΖ…––ΤςΒΡΜυ±Ψ––ΈΣΚΆΦρΒΞ»ΈΈώ”…Έό»ΥΖ…––ΤςΉ‘ΦΚΉ‘÷ςΆξ≥…Θ§Β±ΟφΝΌΗ¥‘”»ΈΈώΚΆ–η“Σ–≠ΉςΒΡ»ΈΈώ ±Θ§Β±«ΑΈό»ΥΖ…––ΤςΩ…“‘Α―»ΈΈώ–≈œΔΚΆΉ ‘¥–η«σΖΔ≤ΦΒΫ”…ΗςΈό»ΥΖ…––ΤςΉι≥…ΒΡΆχ¬γ…œΘ§ΗςΈό»ΥΖ…––ΤςΩ…“‘ΗυΨίΉ‘…μΒ±«Α»ΈΈώΚΆΉ ‘¥«ιΩω”η“‘œλ”ΠΓΘ ’β―υΘ§»Έ“β“ΜΗωΈό»ΥΖ…––ΤςΒΡΆΥ≥ωΜρΦ”»κΘ§ΕΦ≤ΜΜαΕ‘œΒΆ≥Ήι÷·ΫαΙΙ¥χά¥”ΑœλΓΘ ¬ΖΨΕΙφΜ°ΦΦ θ Έό»ΥΜζ‘Ύ ΒΦ Ζ…––÷–»γΙϊ¥φ‘ΎΆΜΖΔΉ¥ΩωΘ§±Ί–κΫχ––ΚΫΦΘ÷Ί–¬ΙφΜ°Θ§“‘“‘Ιφ±ήΆΰ–≤ΓΘΈΣ¬ζΉψ–≠Ά§ΙΛΉς ±ΒΡ ±–ß–‘Θ§÷Ί–¬ΙφΜ°Υυ≤…”ΟΒΡΥψΖ®±Ί–κΨΏ”– Β ±ΓΔΗΏ–ßΒΡΧΊΒψΓΘ“ρ¥ΥΘ§Ω…“‘ΗυΨίΖδ»ΚΥψΖ®Νλ”ρΥ―ΥςΒΡΧΊΒψΘ§“‘≤ΈΩΦΚΫΦΘΒΡΆΜΖΔΆΰ–≤ΉςΈΣΝλΖδΚΫΦΘΘ§ΗζΥφΖδΫω‘Ύ≤ΈΩΦΚΫΦΘΒΡΆΜΖΔΆΰ–≤ΕΈΫχ––Νλ”ρΥ―ΥςΘ§Εχ≤Μ–η“ΣΕ‘’ϊΧθΚΫΦΘΫχ––Υ―ΥςΘ§”…¥ΥΩ…“‘ΩλΥΌΜώΒΟ–ό’ΐΚΫΦΘΕΈΘ§≤ΔΧφΜΜ‘≠ΆΜΖΔΆΰ–≤ΚΫΦΘΕΈΘ§’ϊΗωΖ…––Ιΐ≥Χ÷–Θ§Έό»ΥΜζΗυΨίΜώΒΟΒΡΆΰ–≤–≈œΔΘ§≤ΜΕœ–ό’ΐ≤ΈΩΦΚΫΦΘΘ§÷±÷Ν¥οΒΫΡΩ±ξΫΎΒψΓΘ ±ύΕ”ΩΊ÷ΤΦΦ θ ‘Ύ ΐ―ß…œΘ§±Θ≥÷“ΜΕ®Ω’ΦδΨύάκΒΡΈό»ΥΜζΦ·»ΚΩ…“‘Ω¥Ής“ΜΗωΗΏΫΉ»ΚœΒΆ≥ ±±δ±ύΕ”Έ ΧβΘ§ΤδΩΊ÷ΤΈ ΧβΚή”–Χτ’Ϋ–‘Θ§«“Ά®―Ε ±―”ΒΡ¥φ‘Ύ”÷ΈΣ±ύΕ”Ζ÷Έω‘ωΦ”ΝΥΡ―Ε»ΓΘ
ΝΥΫβΆξΈό»ΥΜζΦ·»Κ–η“Σ’ΤΈ’ΗωΙΊΦϋΦΦ θΘ§ «≤Μ «“Μ ±Μ≈ΝΥ…ώΘ§–ΡœκΓΑΈ“ΗΟ¥”ΚΈ»κ ÷ΡΊΓ±ΘΩΤδ ΒΫϋΡξά¥ΨΆ’β―υΒΡΈ ΧβΘ§ΚήΕύΤσ“Β“―Ψ≠Μυ”ΎΈό»ΥΜζ÷«ΡήΦ·»ΚΩΣΖΔ≥ωΫΧ―ß―–ΨΩ”Π”ΟΤΫΧ®Θ§»ΟΈό»ΥΜζΦ·»Κ―–ΨΩΗϋΦ”ΦρΒΞΓΘ÷Μ–ηΈ“Ο«ΫΧ”ΐΓΔΩΤ―–ΙΛΉς’Ώ‘Ύ”Π”ΟΤΫΧ®…œΉωΫχ“Μ≤Ϋ Β―ιΓΔΩΣΖΔ–¬ΒΡΥψΖ®ΦΑ―–ΨΩΨΆΚΟΝΥΓΘΗΟΫΧ―–Φ·»Κ”Π”ΟΤΫΧ®÷ß≥÷Έό»ΥΜζΕύΜζ±ύΕ”ΩΊ÷ΤΥψΖ®…ηΦΤ”κ Βœ÷Θ§ΧΊ±π’κΕ‘…œΈΡΥυΧαΒΫΒΡΓΔΦ·»ΚΩΊ÷ΤΥψΖ®ΓΔΆ®–≈Άχ¬γ…ηΦΤΓΔ»ΈΈώΙφΜ°ΦΦ θΓΔ¬ΖΨΕΙφΜ°ΦΦ θΓΔ±ύΕ”ΩΊ÷ΤΦΦ θΘ§ΦΑ–≈œΔΗ–÷ΣΦΦ θΓΔ ΐΨί»ΎΚœΦΦ θΓΔ–ιΡβ/ ΒΈο―ι÷Λ Β―ιΤΫΧ®ΦΦ θΒ»Έό»ΥΜζΕύΜζ±ύΕ”ΙΊΦϋΦΦ θΫχ––―–ΨΩΫΧ―ßΘ§ΜΙΩ…ΩΣ’Ι±ύΕ”Ά®–≈‘≠άμΓΔΦ·»ΚΥψΖ®ΓΔΈό»ΥΜζΦ·»ΚΉς’Ϋ‘Υ”ΟΒ» ΒΦυΫΧ―ßΓΘ
Τδ¥ΈΘ§Ε‘”Ύ…œΈΡΈ“Ο«ΧαΒΫΖ÷≤Φ ΫΦ·»Κ÷«ΜέΘ§Ζ÷≤Φ ΫΧΫ≤βΘ§’βάοΥυΩΣΖΔΒΡΫΧ―ß Β―ιΤΫΧ®Θ§“≤”––ß Βœ÷ΝΥΦ·»ΚΜυ”ΎΖ÷≤Φ ΫΦΤΥψœ¬Θ§Άξ≥…ΗϋΈΣΗ¥‘”ΒΡΕ·ΉςΚΆ–≠Ά§ΓΘΕχ«“œΒΆ≥ΩΣΖ≈–‘«ΩΘ§”ΟΜß≤Μ–η“Σ’ΤΈ’ΧΪΕύΒΡΒΉ≤ψ±ύ≥ΧΦΦ θΦ¥Ω…Άξ≥…ΥψΖ®ΒΡ–όΗΡΚΆ―ι÷ΛΘ§Ω…ΩλΥΌ Βœ÷Εύ÷÷Έό»ΥΜζΒΞΜζΖ…––»ΈΈώΓΔ»γΉ‘÷ς–ϋΆΘΓΔΙλΦΘΙφΜ°Β»ΓΘ“≤Ω…ΩλΥΌ Βœ÷ΕύΈό»ΥΜζΦ·»ΚΩΊ÷ΤΥψΖ®Θ§Αϋά®ΕύΜζΖ…‘≤ –ΈΓΔΕύΜζΖ…ΑΥΉ÷Θ§ΕύΜζ«χ”ρΗ≤Η«Β»Θ§ΈΣΈό»ΥΜζΩΊ÷ΤΦΑΕύΜζΦ·»ΚΩΊ÷ΤΒ»ΫΧ―ß―ί ΨΦΑΕΰ¥ΈΩΣΖΔ Β―ιΧαΙ©ΚΥ–Ρ…η±Η÷ß≥≈ΓΘ
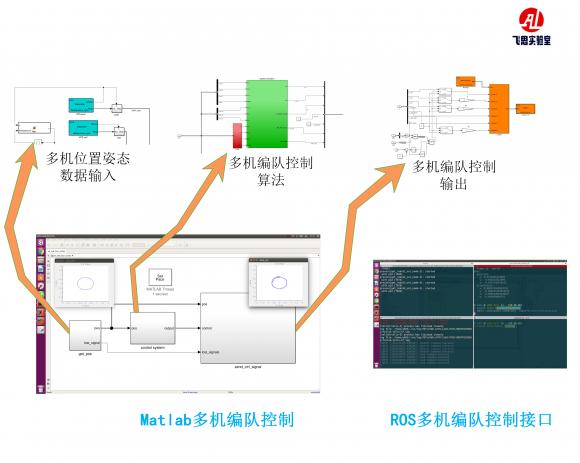
œΒΆ≥ Ι”Ο“≤Ζ«≥ΘΦρΒΞΘ§“ρΈΣΥϋ «Μυ”Ύ Matlab/Simulink ΩΣΖΔΘ§≤Μ–η“Σ–όΗΡΒΉ≤ψ¥ζ¬κΘ§Φ¥Ω…ΩλΥΌΕ‘ΩΤ―–Ά≈Ε”ΒΡΩΊ÷ΤΜρ±ύΕ”ΥψΖ®Ϋχ––―ι÷Λ Ι”Ο’ΏΗϋΦ”Ή®ΉΔ”ΎΥψΖ®―–ΨΩΙΛΉςΘ§Φλ―ιάμ¬έ≥…ΙϊΘ§Χα…ΐ Β―ι–߬ Θ§¥σ¥σΆΤΕ·ΫΧ―ß―–“ΜΧεΜ·Ϋχ≥ΧΘ§Φ”ΥΌΫΧ―ßΓΔΩΤ―–ΒΡΫχΕ»ΓΘ Έό»ΥΜζΉ‘÷ςΦ·»Κ“‘ΒΆ≥…±ΨΓΔΗΏΖ÷…ΔΒΡΉι÷·–Έ Ϋ¬ζΉψΙΠΡή–η«σΘ§“‘»Ξ÷––ΡΜ·Ή‘ΉιΆχΧα…ΐœΒΆ≥ΗΏ–ß–≈œΔΙ≤œμΓΔΩΙΙ ’œ”κΉ‘”ζΡήΝΠΘ§“‘ΙΠΡήΖ÷≤ΦΜ·ΧαΗΏΧεœΒ…ζ¥φ¬ ΚΆ–߬ ΫΜΜΜ±»ΓΘ»γΚΈΫ®ΝΔΈό»ΥΜζΦ·»Κ’β“Μ’ϊΧεΕ·Χ§ΧΊ–‘ΚΆΈοάμ‘Φ χΒΡΡΘ–ΆΘ§»γΚΈΟφœρΗϋΦ”Η¥‘”ΒΡ»ΈΈώΜΖΨ≥ΫΪ»ΥΙΛ÷«Ρή”κΈό»ΥΜζΦ·»ΚΉ‘÷ςΩΊ÷ΤΫτΟήΫαΚœΘ§»γΚΈΫΪ”–»Υ”κΈό»ΥΜζΓΔΈό»Υ≥ΒΓΔΈό»Υ¥§Β»Ωγ”ρ»ΎΚœΘ§ Βœ÷»ΪΉ‘÷ς»ΚΦ·œΒΆ≥ΙψΖΚ”Π”ΟΘ§ΜΙ–η“ΣΫχ“Μ≤Ϋ―–ΨΩΚΆ…ν»κΧΫΥςΓΘΨΏ”–ΓΑΤΫΧ®ΦρΒΞΓΔΗΏΕ»–≠ΒςΓΔΆξ»ΪΉ‘÷ςΓΔ»ΚΧε÷«ΡήΓ±ΧΊΒψΒΡΈό»ΥΜζΉ‘÷ςΦ·»ΚœΒΆ≥ Τ±ΊΫΪ“ΐΖΔ–¬“Μ¥ζ’Ϋ’υΡΘ ΫΒΡΒΏΗ≤–‘±δΗοΘ§≤ΜΫω‘Ύ…χΆΗ’λ≤λΓΔ”’Τ≠Η…»≈ΓΔ≤λ¥ρ“ΜΧεΓΔ–≠Ά§ΙΞΜςΒ»ΙζΖάΩΤΦΦΝλ”ρ¥σœ‘…μ ÷Θ§Εχ«““≤ΫΪ‘Ύ÷«ΡήΫΜΆ®ΓΔΒΊ÷ Ω±≤βΓΔ‘÷ΚΠΦύ≤βΓΔ≈©“Β÷≤±ΘΓΔΈοΝς‘Υ δΒ»ΙζΟώΨ≠ΦΟΖΔ’Ι÷–”–Ή≈ΙψάΪΒΡΖΔ’Ι«ΑΨΑΓΘ (÷–ΙζΦ·»ΚΆ®–≈Άχ | ‘π»Έ±ύΦ≠ΘΚ’≈≥ΰ…ζ) |