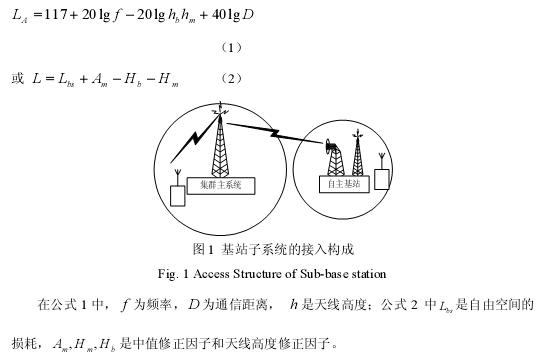
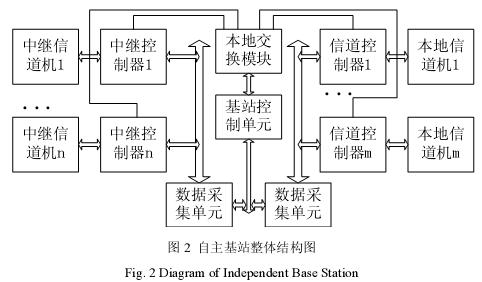
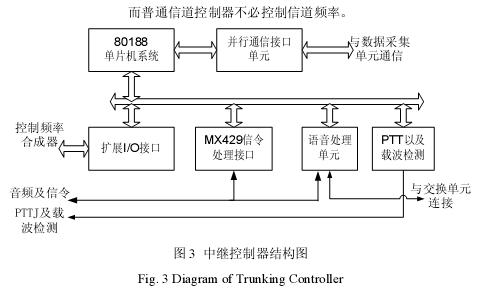
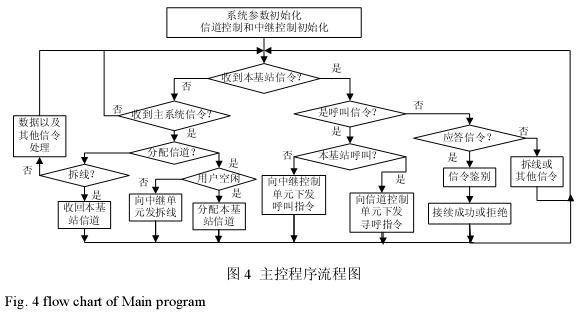
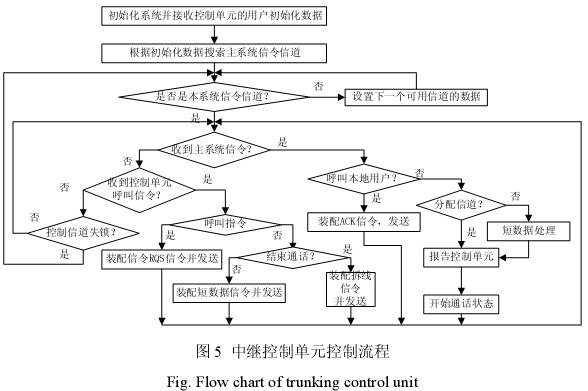
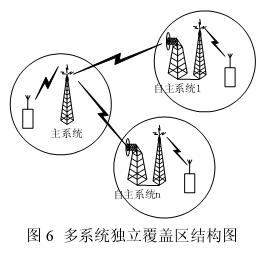
主页(http://www.pttcn.net):集群系统自主式基站系统的设计与实现 集群移动通信系统用来完成如通信调度、指挥等功能,同时对系统内的用户有较强的优先级别管理功能,但是在某些突发事件条件下,集群系统往往只能作到在当地建立指挥系统,在没有有线或微波中继的条件下,建立与外界其他网络的联系有一定困难;或者在偏远地区,建立集群系统投入过大,只建立基站又不能与外界通信。所以,如果能建立一个能独立运行的基站系统,同时本基站系统又可作为主集群系统的终端进入主集群网络,则可以既减少了投入,又扩大了集群系统的服务区域。基于这些设想,并结合我们已经设计并运行的采用MPT-1327国际标准的系统[1][2][3][4][5],同时考虑系统向数字化过度的需要,我们提出了集群系统自主式基站的设计。 1.系统的基本设计方案 集群系统基本为大区结构,无线覆盖范围由基站、用户端的功率以及双方天线高度决定。集群系统一旦建立,服务区域就基本确定。虽然可以通过新增加基站来增大服务覆盖区,但一是要修改系统软件配置,二是要求更新系统硬件连接关系,使得系统不能发挥灵活快速的通信指挥特点。因此,本文在不改变原有集群系统配置的条件下,建立一个小规模基站子系统,可以独立工作,可以作为用户接入主集群系统,可以建立在任何需要架设基站的位置,扩大系统服务区域,同时,由于对于原有系统是作为用户机存在,原有系统不必重新配置,系统的结构如图1所示。 对于一般的系统的覆盖范围,可以采用Egli模型或奥村模型进行估算,如果集群系统的基站天线高度、用户天线高度以及增益都已知,则基站与用户之间的传播损耗为: 在一般的大区制系统中,服务半径大约30km,在这个范围内可以保证不同类型的用户如便携式用户与车载用户的可靠通信。但是由于便携式用户发射功率小,所以双向的可靠通信距离一般在15公里左右,因此本系统的设计采用主系统通信半径15公里做作为设计参照指标。如果主系统基站天线高度为30m,用户天线高1.5m,工作频率350MHz,通信距离15km,则由式(1)的Egli模型得到的损耗为173dB。如果以奥村模型,采用公式(2)的奥村图表法得到损耗为165dB。当采用自主基站接入,自主基站覆盖自己的服务区,同时通过定向高增益天线与主系统连接,则可以使得主系统与自主基站间的通信距离大大超过原有的15km。 由于地球表面曲率的影响,所以上面公式1和2要做一定的修正,由于陆地移动通信的视距传播,所以要进行修正,地球表面视距与天线高度的关系如下: 采用式(1)(2)的损耗模型并采用(3)修正后,表1给出了主系统基站间中继距离的数值。 从表中可以看到,采用自主基站是可以大幅度提高集群系统的覆盖范围。作为调度通信指挥使用,采用自主式基站接入系统后,通信覆盖半径可以近似认为是两个基站的距离加上自主基站的覆盖半径,如果自主基站采用30m天线,其覆盖半径可以达到约15km。所以总的服务半径可达79km,是原有系统的约5倍,服务覆盖面积可以从几百平方公里增加到数千平方公里。使得系统在大范围内统一调度指挥的能力大大加强。 表1 主系统与自主基站间中继距离的变化 2.系统的硬件构成 自主基站系统应该具备两方面的功能:一是在没有与外界的联系条件下,完成本基站覆盖区域内的调度通信;二是在需要的情况下,通过中继连接信道作为主集群系统的用户终端接入主系统并通过主系统进入其他通信网络。 系统的整体结构如图2所示。 系统中的中继信道机采用高增益定向天线,中继控制器具有用户终端机的全部功能,数据采集单元完成信道控制器与基站控制单元内部数据以及信令的传输,本地交换模块完成所有信道之间的交换功能,信道控制器负责处理本基站用户的呼叫请求以及相关的话务处理,除了中继控制器外,均可以采用普通集群的控制模块,来简化设计。在本系统的设计中信道控制单元采用了我们已有的设计[6]。 当本地用户发出呼叫指令时,基站控制单元首先进行分析,判断是否为本地基站用户,如果是,则通过本基站信令信道下发用户有效性检查AHY指令,并根据用户对此指令的回答做出接续或拒绝的处理;如果本基站以外的用户,则通过数据采集单元向一个空闲的中继控制器下发呼叫指令,中继控制器经过变换,称为标准的起呼指令RQS发送到远端主集群系统,此时中继控制器作为主系统用户存在,处理主集群系统后续信令,如果呼叫成功,将按照主系统的指令转移到相应的话务信道上,并报告本地基站控制单元,接续成功。本地基站再在自己的信令信道上向原呼叫用户下发信道分配指令,分配一个本地通话信道。然后向本地交换模块发出端口交换指令,接通本地无线信道与相应的中继信道。需要说明的是中继控制可以控制中继信道机覆盖主系统所有频率,本地信道则可以使用另外的频率资源。 中继控制器的结构如图3所示,与信道控制器相比,它必须完成信道的自动切换与复原,而普通信道控制器不必控制信道频率。 图3中,扩展I/O接口用中继信道机的频率合成器控制;MX429用来处理MPT-1327数字信令;语音单元用于控制调度通话或将话音送到交换模块,并行接口则负责与数据采集单元进行通信将收到的信令上发或接收数据采集单元的指令。 自主基站系统的目的是对主系统的服务区域进行补充和扩展,特别是针对[偏远地区或者意外事件突发区,因此基站系统可以是固定模式,也可以是车载模式,当采用车载模式后,系统在覆盖区域和通信指挥的灵活性将得到更大的发挥,可以做到在需要时立即建立服务区,不需要时撤消或转移服务区。 3.系统控制软件的设计 在原有集群系统的软件基础上,我们重新设计了基站控制单元软件以及中继控制器的软件。主控软件流程如图4所示。 自主基站的主控流程在初始化之后将系统的用户数据下发给中继控制单元,鉴于MPT-1327信令时隙的要求,中继信道控制单元必须在收到寻呼信令AHY后立即回答,所以在主控流程中,只处理分配信道以后的系统信令,之前的信令由中继信道控制单元独立处理。中继控制器软件流程如图5所示。 在中继控制单元中,程序负责将本基站对外的呼叫申请发送到主系统。对于实时性不强的信令,中继系统将负责将控制单元的指令进行转发;对于实时性要求强的如寻呼AHY信令等,将首先响应进行回答,发送ACK信令,然后在将后续信令报告自主基站控制单元。 4.多个自主基站与主系统的联合运行 当自主基站系统与主系统联合工作时,特别是当一个主基站与多个自主基站系统联合运行,会构成一个多独立区覆盖系统,结构如图6所示。 对于多个系统同时加入主系统构成的多覆盖区系统,一个主要问题是用户数据的更新问题。由于用户一定的随机性,可能在下一次通话之前从自主系统1移动到自主系统n。自主系统n可以通过用户的登记请求信令刷新自身数据库,但是自主系统n无法了解到该用户已经离开,所以在主系统对该用户发出寻呼指令AHY时候自主系统1和n会同时进行应答,导致信令的碰撞,进而出现接续失败。 为了保证通信的可靠,我们为自主系统设计了特殊的短数据通信,可以保证自主系统加入主系统[1][2][6]完成自动数据更新,与MPT-1327信令其他系统联合工作时需要通过有线专线或人工方式解决此问题。独立的自主基站系统可以安装成为车载系统,这样既可以保证远距离通信覆盖,又可以实现灵活的覆盖区域改变。 6.结论 本文设计一种自主基站系统,既可以独立工作,又可以与任何MPT-1327信令的集群系统联合运行,大大增加系统的覆盖区域。同时自主基站系统如果采用车载方式,更可以提高系统的灵活性,满足突发情况或边远地区的通信指挥。 参考文献 1.谭学治,沙学军等,张乃通 一种采用MPT-1327数字信令的智能集群移动通信系统,移动通信,1995,(4):39~42. 2.谭学治,沙学军 使用MPT-1327信令的准传输集群移动通信系统,移动通信,1994,(6):41~44. 3.沙学军,谭学治,张乃通 动态帧长ALOHA在集群系统中的应用通信学会 第四届年会,1995:931~934. 4.沙学军,谭学治 集群系统信令信道业务量的分析与控制 无线电通信技术,1999,25卷(2):34~38. 5.ShaXuejun,Xuyubin and Wangbeisong Design and Implementation of Digital Switch for Trunking system,Journal of Harbin Institute of Technology 2000,Vol7(2):43~47. 6.谭学治,沙学军,张乃通 一种单片机控制的数字信令集群移动通信系统信道控制器 无线电通信技术,1999年,25卷(3):47~50. (中国集群通信网 | 责任编辑:陈晓亮) |