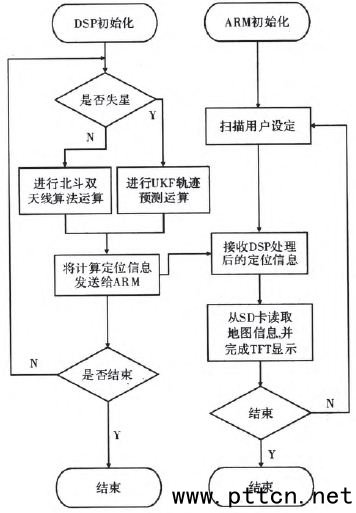
主页(http://www.pttcn.net):一种基于双天线的北斗定位系统设计与实现(3) 3 系统工作流程 3.1 系统总体工作流程 系统采用DSP+ARM双核结构,DSP与ARM各司其职。在系统上电后,DSP、ARM芯片完成上电复位,DSP通过USART接收北斗定位模块的定位信息,在不失星的情况下进行北斗双天线定位算法计算。而DSP在进行北斗双天线定位算法计算后,通过串口将计算后的北斗定位信息发送给ARM芯片。若处于失星的情况下,进行UKF算法轨迹预测,并将得到的预测结果通过串口发送给ARM芯片,ARM芯片接收到北斗定位信息后,通过FSMC总线将定位信息更新到TFT液晶屏上,如图5所示。
3.2 轨迹预测算法设计 系统采用无迹卡尔曼滤波(UKF)做为失星情况下的轨迹预测算法。无迹卡尔曼滤波(UKF)是一种基于最小方差估计准则的非线性状态估计器,其以非线性最优高斯滤波器作为基本理论框架。UKF采用UT变换技术,即采用确定的样本点(Sigma点)来完成状态变量统计特性沿时间的传播,改进了扩展卡尔曼滤波(EKF)不能求解雅可比矩阵以及泰勒级数线性化只具有一阶的低精度问题,其逼近精度可达二阶或二阶以上。U KF算法实现过程如下 Step1
式中,x为未失星前时刻北斗双天线定位所得定位经、纬度信息;px是x的协方差;n表示系统状态维数;北斗应用中n取值为2;λ是微调参数,其可控制样本点到均值的距离。 step2 根据系统状态方程求样本点传递值 (2) Step3 求系统定位误差均值和方差的一步预测
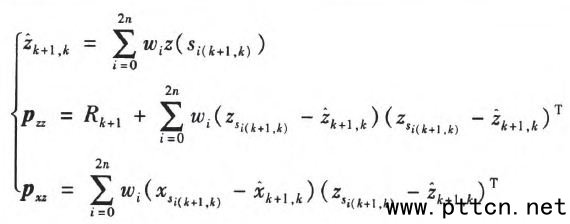
Step4 根据系统量测方程求取定位误差状态一步预测的传递值
Step5 获得定位误差均值和协方差
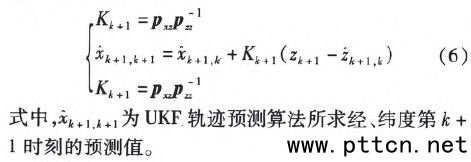
式中,pzz是定位误差的量测方差矩阵;pxz是定位误差状态向量与定位误差量测向量的协方差矩阵。 Step6 计算UKF增益,更新定位误差状态向量和方差
|
 (1)
(1) (3)
(3) (4)
(4) (5)
(5)